
Energieeffizienter Roboterbetrieb
4.0-Anwendungen:
Energiebedarfsreduktion, -management
14.0-Technologien:
Robotik, Sensoren, rechnergestützte Messtechnik
Funktionsbeschreibung:
Der Energiebedarf eines Roboters kann per Messkoffer + PC ermittelt werden, potentielle Energieeinsparungenmaßnahmen sind der Broschüre (siehe URL) zu entnehmen, z.B. Optimierungen bei: Positionierung, Bahnpunkten, Bewegungsstart, Homeposition, Geschwindigkeit, Beschleunigung, Bremseinfallzeit
Mögliche Problemlösung/Prozessoptimierung:
Das Umsetzen der Empfehlungen zum energieeffizienten Roboterbetrieb
(gern. Broschüre) führt direkt zu Energieeinsparungen und somit unmittelbar zu einer Reduktion der Kosten. Zudem können Daten über den Energiebedarf der eigenen Anlagen erlangt werden, die evtl. zuvor nicht erhoben wurden (Durchführung eines Energie-Monitorings).
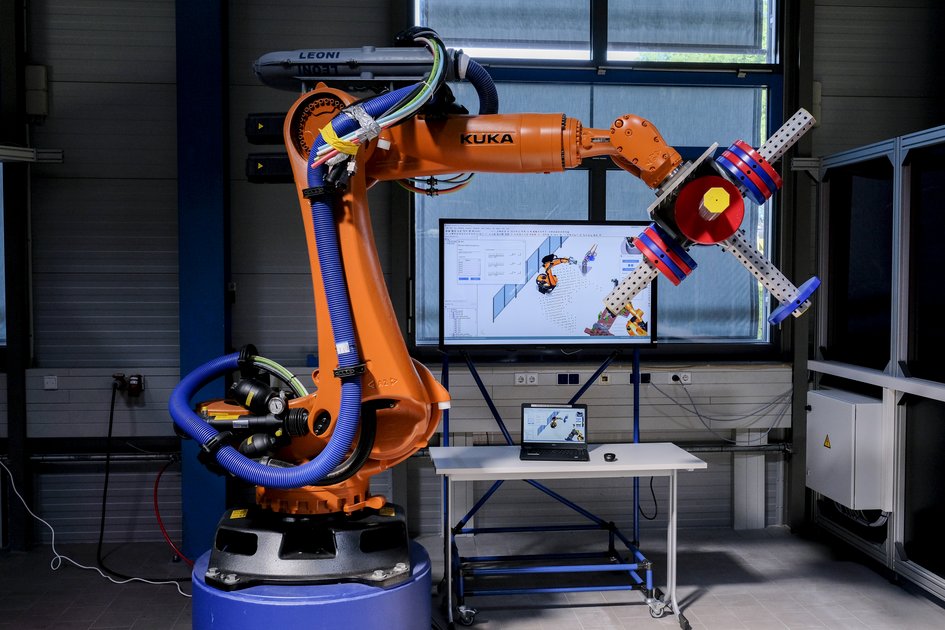
Technischer Aufbau:
Für die Studie verwendet: KUKA KR210, KR120, KR60 (210, 120 und 60 kg Traglast). Geeignet für empfohlene Maßnahmen: alle Industrieroboter mit entsprechender Traglast. Programmierumgebung: online (Pad)/offline (PC).
-ggf. Messkoffer einschleifen
-ggf. Einsatz von Simulationssoftware: Siemens Process Simulate als Hilfsmittel zur Umsetzung/Visualisierung der Optimierungsmaßnahmen (KUKA-Ouellcode z.B. kann in Siemens Process Simulate geladen werden).
Erfahren Sie mehr:
Prof. Dr.-Ing. Holger Brüggemann
Arbeitsgebiete: Montage- und Robotertechnik, Digitale Fabrik, QM, Ressourceneffizienz
zur Profilseite
Gebäude H, Raum 114
