
Labor Internet of Things

Das Labor Internet of Things (IoT) bietet Studierenden eine moderne Umgebung zur praktischen Umsetzung vernetzter, intelligenter Systeme. Im Fokus stehen Anwendungen in den Bereichen Sensorik, Datenanalyse, Edge-Computing, Kommunikationstechnologien und eingebettete Systeme. Leistungsfähige Rechensysteme mit Jetson- und Orin-Plattformen sowie RTX-basierte Workstations ermöglichen die Entwicklung und Erprobung von KI-Algorithmen direkt an mechatronischen Systemen im Labor. Im praktischen Einsatz arbeiten Studierende an IoT-basierten Mobilitätsanwendungen wie pulsadaptiven E-Bikes, JetBots mit Car2X-Kommunikation oder Objektverfolgung mit KI und Kamerasystemen auf Slotcar-Strecken.
Auch autonome Systeme wie der Quanser QCar2 oder der der humanoide NAO-Roboter kommen zum Einsatz, um Machine-Learning-Methoden im vernetzten Kontext zu testen. Das Labor bietet damit eine umfassende Infrastruktur, um zukunftsweisende IoT-Konzepte praxisnah zu entwickeln und die Potenziale vernetzter intelligenter Systeme interdisziplinär zu erforschen.
KI in der Regelungstechnik und Modellbildung
Aero Quanser 2

Der Aero Quanser 2 ist ein modernes Experimentiergerät zur Simulation komplexer dynamischer Systeme und bietet eine ideale Plattform für den praktischen Einsatz von künstlicher Intelligenz (KI) an mechatronischen Systemen. Im Rahmen von Übungen und studentischen Arbeiten zur Künstliche Intelligenz wird das Modell genutzt, um Algorithmen des maschinellen Lernens, neuronale Netze und Reinforcement Learning (RL) in realen Regelungsaufgaben zu erproben.
Mithilfe von datengetriebenen Methoden lernen Studierende, KI-Modelle für die autonome Regelung und Optimierung des Systems zu entwickeln. Dabei stehen folgende Aspekte im Fokus:
Reinforcement Learning (RL) zur Entwicklung autonomer Regelungsstrategien ohne explizite Modellierung
Neuronale Netze zur Prädiktion und Mustererkennung im Systemverhalten
Optimierung von Regelparametern durch KI-basierte Lernverfahren
Vergleich von klassischen Regelungsverfahren und modernen KI-Ansätzen zur Bewegungssteuerung
Durch die Anwendung dieser Methoden am Aero Quanser 2 gewinnen Studierende praktische Erfahrung in der Implementierung und Feinabstimmung von KI-Modellen für echtzeitkritische, rückgekoppelte physikalische Systeme. Dies fördert nicht nur das algorithmische Verständnis, sondern zeigt auch die Herausforderungen und Potenziale KI-gestützter Regelungen in der Praxis.
Quanser Linear Flexible Inverted Pendulum

Das Linear Flexible Inverted Pendulum (LFIP) ist ein komplexes, nichtlineares System, das sich ideal für die Anwendung und Erforschung von künstlicher Intelligenz (KI) in der Regelungstechnik eignet. Im Rahmen von Übungen und studentischen Arbeiten zur Künstlichen Intelligenz wird das Modell genutzt, um Algorithmen des maschinellen Lernens, neuronaler Netze und Reinforcement Learning (RL) zur Stabilisierung und Steuerung eines hochdynamischen Systems zu implementieren.
Das System zeichnet sich durch eine Kombination aus linearer Bewegung und flexibler Pendeldynamik aus, wodurch es besonders herausfordernd für klassische regelungstechnische Verfahren ist. KI-gestützte Methoden ermöglichen eine adaptive und datengetriebene Regelung. Die Studierenden erforschen unter anderem folgende Ansätze:
Reinforcement Learning (RL) zur selbstlernenden Stabilisierung des invertierten Pendels
Neuronale Netze zur Vorhersage des Systemverhaltens und zur modellfreien Regelung
Optimierung von Regelungsparametern durch evolutionäre Algorithmen und maschinelles Lernen
Vergleich von modellbasierten Regelungen und datengetriebenen KI-Methoden
Durch den Einsatz des LFIP erlangen die Studierenden ein tiefgehendes Verständnis für die Herausforderungen der KI-basierten Regelung nichtlinearer, instabiler Systeme. Die praxisnahe Umsetzung ermöglicht es, Reinforcement Learning und neuronale Netze in einer realen Umgebung anzuwenden und zu evaluieren.
Quanser Qube-Servo 2

Der Quanser Qube-Servo 2 ist ein vielseitiges mechatronisches System, das sich ideal für die Anwendung von künstlicher Intelligenz (KI) in der Regelungstechnik eignet. Im Rahmen von Übungen und studentischen Arbeiten zur Künstlichen Intelligenz wird das Modell genutzt, um Reinforcement Learning (RL), neuronale Netze und datengetriebene Optimierungsmethoden in der Regelung eines dynamischen Systems zu erproben.
Der Qube-Servo 2 besteht aus einem Gleichstrommotor mit einer invertierten Pendelstange, wodurch er sich hervorragend für das Studium von nichtlinearen und instabilen Systemen eignet. Klassische Regler (z. B. PID oder LQR) werden mit modernen KI-Methoden verglichen, um deren Leistungsfähigkeit in adaptiven Szenarien zu bewerten.
Die Studierenden wenden unter anderem folgende KI-Methoden an:
- Reinforcement Learning (RL) zur autonomen Regelung des invertierten Pendels
- Neuronale Netze zur Prädiktion des Systemverhaltens und zur modellfreien Regelung
- Optimierung von Regelungsparametern durch datengetriebene Lernverfahren
- Vergleich zwischen klassischen Regelungsansätzen und KI-gestützten Methoden
Durch den praktischen Einsatz des Quanser Qube-Servo 2 erlangen die Studierenden wertvolle Erfahrungen in der KI-gestützten Regelung instabiler mechanischer Systeme. Die Übungen bieten eine realistische Umgebung zur Erforschung der Herausforderungen und Potenziale von KI in der modernen Regelungstechnik.
KI in humanoider Robotik
NAO - Humanoid Robots

NAO-Roboter gehören zu den humanoiden Lernrobotern, die sich ideal für die praxisnahe Anwendung von künstlicher Intelligenz (KI) eignen. Im Rahmen der Übungen und studentischen Arbeiten werden NAO-Roboter genutzt, um maschinelles Lernen, Computer Vision, Sprachverarbeitung und autonome Entscheidungsfindung in einer realen Umgebung zu erproben.
Dank seiner vielfältigen Sensoren, Kameras, Mikrofone und Aktoren ermöglicht NAO die Implementierung und Evaluation von KI-Algorithmen in verschiedenen Anwendungsbereichen. Die Studierenden setzen unter anderem folgende Methoden ein:
- Reinforcement Learning (RL) zur Optimierung von Bewegungen und Navigationsstrategien
- Neuronale Netze für Computer Vision zur Objekterkennung und Interaktion mit der Umgebung
- Sprachverarbeitung (NLP) zur Entwicklung von Dialogsystemen und Sprachsteuerung
- Multi-Agenten-Systeme zur Koordination und Interaktion mehrerer Roboter
- Verhaltensmodellierung für autonome und adaptive Entscheidungsfindung
Durch die direkte Interaktion mit dem NAO-Roboter erhalten die Studierenden praxisnahe Einblicke in die Herausforderungen der KI-gestützten Robotik, wie die Verarbeitung sensorischer Daten in Echtzeit oder die Steuerung komplexer Bewegungsabläufe. Die Übungen fördern ein tiefgehendes Verständnis für die Anwendung von KI in humanoiden Robotersystemen.
KI für Objektverfolgung
Carrera Slot Car Racer

Carrera Slot Car Racer bieten eine ideale Plattform für die praxisnahe Anwendung von künstlicher Intelligenz (KI) im Bereich der Objektverfolgung. Im Rahmen von Übungen und studentischen Arbeiten zur Künstlichen Intelligenz werden KI-Algorithmen entwickelt, um die Bewegung der Fahrzeuge in Echtzeit zu erfassen.
Durch den Einsatz von Kameras, Sensoren und maschinellen Lernverfahren können die Studierenden verschiedene Methoden zur KI-gestützten Objektverfolgung erproben, darunter:
- Computer Vision zur Echtzeit-Erkennung und Verfolgung der Fahrzeuge auf der Rennstrecke
- Neuronale Netze zur robusten Verarbeitung von Bild- und Sensordaten
- Edge Detection & Feature Tracking zur präzisen Identifikation von Fahrzeugpositionen und Bewegungsrichtungen
- Datenanalyse & Prädiktive Modellierung zur Vorhersage von Fahrzeugbahnen und Rennverläufen
Diese praktische Anwendung ermöglicht den Studierenden ein tiefgehendes Verständnis für die Integration von KI-Algorithmen für Objekterkennung und -verfolgung.
KI und Car2X-Ansätze für autonomes Fahren
JetBots mit IoT-Kommunikationsmodulen für Car2X Anwendungen
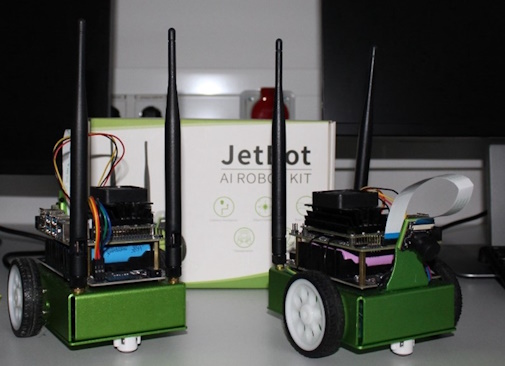
JetBots, ausgestattet mit IoT-Kommunikationsmodulen, bieten eine ideale Plattform zur Erforschung und Umsetzung von Car2X-Kommunikation im Kontext autonomer und vernetzter Fahrzeuge. Im Rahmen von Übungen und studentischen Arbeiten werden Lösungen entwickelt, um Fahrzeug-zu-Fahrzeug (V2V) und Fahrzeug-zu-Infrastruktur (V2I) Interaktionen zu ermöglichen.
Mithilfe der NVIDIA Jetson-Plattform und Echtzeit-Kommunikation über IoT-Module können die Studierenden verschiedene KI- und Netzwerktechnologien zur intelligenten Verkehrssteuerung und kollaborativen Entscheidungsfindung erproben. Dabei stehen folgende Schwerpunkte im Fokus:
Computer Vision zur Objekterkennung, Verkehrszeichenerkennung und Hindernisvermeidung
V2V-Kommunikation für den Austausch von Sensordaten und kollektive Fahrentscheidungen
V2I-Integration zur Interaktion mit vernetzten Infrastrukturen wie Ampelsystemen oder Verkehrsleitsystemen
Durch diese Experimente gewinnen die Studierenden praktische Einblicke in die Herausforderungen der KI-gestützten Fahrzeugkommunikation und vernetzten Mobilität. Die Car2X-Anwendungen mit JetBots demonstrieren das Potenzial von KI und IoT in modernen autonomen Fahrsystemen und bereiten auf zukünftige Entwicklungen in der Smart Mobility vor.
JetRacer, AWS Deep Racer mit IoT-Kommunikationsmodulen für Car2X Anwendungen

Die Modelle JetRacer, AWS DeepRacer und Quanser QCar2 bieten eine ideale Plattform zur Erforschung und praktischen Umsetzung von KI-gestützten Algorithmen für autonomes Fahren. Im Rahmen von Übungen und studentischen Arbeiten zum Thema Künstliche Intelligenz werden diese Fahrzeuge genutzt, um Maschinelles Lernen, Computer Vision und Sensorfusion in realitätsnahen Fahrszenarien zu erproben.
Dank ihrer leistungsfähigen Hardware-Plattformen (wie NVIDIA Jetson, AWS Machine Learning Services und Quanser QCar2-Sensormodule) ermöglichen diese Modelle die Umsetzung und Analyse verschiedener KI-Methoden für autonomes Fahren. Die Studierenden arbeiten an folgenden Schwerpunkten:
- Reinforcement Learning (RL) zur autonomen Fahrstrategie-Optimierung
- Computer Vision zur Erkennung von Fahrbahnmarkierungen, Hindernissen und Verkehrsschildern
- Sensorfusion zur Integration von Kameras, Lidar und IMU-Daten für präzise Umfeldwahrnehmung
- End-to-End Deep Learning zur Steuerung auf Basis neuronaler Netze
- V2X-Kommunikation zur Interaktion mit anderen Fahrzeugen und der Infrastruktur (Quanser QCar2)
- Sim-to-Real-Transfer für die Übertragung von KI-Modellen aus der Simulation in reale Fahrversuche (AWS DeepRacer)
Durch die praxisnahe Anwendung dieser KI-Methoden gewinnen die Studierenden tiefergehende Einblicke in autonome Fahrzeugtechnologien und deren Herausforderungen, insbesondere in den Bereichen Echtzeitverarbeitung, Sicherheitsaspekte und Optimierung von Lernprozessen. Die Kombination von Simulations- und Realtestszenarien fördert ein umfassendes Verständnis für den Einsatz von KI im autonomen Fahren und bereitet auf zukünftige Entwicklungen in der Mobilität vor.
IoT-Anwendungen für mechatronische Systeme
Puls-basierte Antriebsregelung an E-Bikes

Die puls-basierte Antriebsregelung für E-Bikes kombiniert IoT-Technologie, KI-gestützte Datenanalyse und adaptive Steuerung, um die Motorunterstützung individuell an die körperliche Belastung des Fahrers anzupassen. Im Rahmen von studentischen Arbeiten wird diese Technologie genutzt, um Methoden des maschinellen Lernens, der Sensorfusion und der Echtzeit-Datenverarbeitung in einem praxisnahen Mobilitätskonzept zu erproben.
Durch die Integration von Herzfrequenzsensoren, IoT-Kommunikation und KI-basierten Regelalgorithmen können die Studierenden verschiedene Ansätze zur intelligenten Anpassung der Motorleistung untersuchen. Dabei stehen folgende Schwerpunkte im Fokus:
- Echtzeit-Analyse von Herzfrequenzdaten zur Bewertung der körperlichen Belastung
- Maschinelles Lernen zur Optimierung der Motorunterstützung basierend auf individuellen Fahrprofilen
- Neuronale Netze zur Vorhersage der optimalen Belastung für eine adaptive Antriebsregelung
- Edge- und Cloud-Computing zur effizienten Verarbeitung und Speicherung von Fahrdaten
- Vernetzte Mobilität (V2X) zur Interaktion mit Infrastruktur- und Verkehrsmanagementsystemen
- Datengetriebene Optimierung des Energieverbrauchs zur Maximierung der Akkulaufzeit und Fahrreichweite
Durch die praxisnahe Umsetzung dieser Methoden mit IoT-vernetzten E-Bike-Modifikationen erhalten die Studierenden tiefgehende Einblicke in die KI-gestützte Anpassung von Mobilitätssystemen. Die Experimente zeigen das Potenzial von datengetriebener Regelung, vernetzter Infrastruktur und personalisierter Fahrzeugsteuerung für zukünftige Smart-Mobility-Anwendungen.
Elektronik-Arbeitsplätze
Elektronik-Arbeitsplätze

Die Elektronik-Arbeitsplätze im Labor sind mit einer umfassenden Ausstattung für die Entwicklung, Analyse und Prüfung elektronischer Schaltungen ausgestattet. Die vorhandenen Geräte ermöglichen den Studierenden eine praxisnahe Umsetzung theoretischer Konzepte und unterstützen Forschungsarbeiten in den Bereichen Schaltungstechnik, Messtechnik und Embedded Systems.
Ausstattung der Elektronik-Arbeitsplätze:
Lötstationen: Professionelle Löt- und Entlötstationen für präzise Arbeiten an elektronischen Baugruppen, einschließlich temperaturgeregelter Spitzen für SMD- und THT-Komponenten
Labor-Netzgeräte: Präzise regelbare DC-Netzteile mit Mehrkanalversorgung zur Spannungs- und Stromversorgung elektronischer Schaltungen und Module
Oszilloskope: Hochauflösende Digitaloszilloskope zur Signalanalyse, Fehlerdiagnose und Prüfung von Hochfrequenz- und Digitalschaltungen
Multimeter und Messtechnik: Hochpräzise Multimeter, Funktionsgeneratoren und Spektrumanalysatoren zur exakten Bestimmung von Spannungen, Strömen, Widerständen und Signaleigenschaften
Prüf- und Testeinrichtungen: Komponenten-Tester, Logikanalysatoren und Signalgeneratoren zur Simulation und Analyse von digitalen und analogen Schaltungen
ESD-Schutzmaßnahmen: Erdungsmatten, antistatische Werkzeuge und sichere Arbeitsumgebungen zum Schutz empfindlicher elektronischer Bauteile
Anwendungsbereiche im Labor:
Die Ausstattung der Elektronik-Arbeitsplätze ermöglicht eine breite Palette an Experimenten und Projekten in den Bereichen:
- Entwicklung und Analyse analoger und digitaler Schaltungen
- Fehlersuche und Reparatur elektronischer Baugruppen
- Prototyping und Test von Embedded Systems und Mikrocontrollern
- Messung und Charakterisierung von Bauteilen und Signalen
- Löten und Bestücken von Leiterplatten für Hardware-Projekte
Durch die moderne und umfangreiche Laborausstattung erhalten die Studierenden eine praxisnahe Ausbildung in Elektronik, Schaltungstechnik und Messtechnik, die sie optimal auf industrielle Anwendungen und Forschungsprojekte vorbereitet.
Rechnerausstattung für KI und High-Performance-Computing-Anwendungen
Rechnerausstattung für KI und High-Performance-Computing-Anwendungen


Das Labor verfügt über eine moderne Rechnerinfrastruktur, die speziell für Anwendungen in den Bereichen künstliche Intelligenz (KI), maschinelles Lernen, High-Performance-Computing (HPC) und Simulationen ausgelegt ist. Die Kombination aus NVIDIA DGX-Station, Jetson-Plattformen und leistungsstarken Gaming-Rechnern mit aktuellen RTX-Grafikkarten ermöglicht eine effiziente Entwicklung, Trainings- und Testumgebung für anspruchsvolle KI- und Simulationsprojekte.
NVIDIA DGX Station: Hochleistungs-KI-Workstation mit mehreren NVIDIA A100/Tensor Core GPUs, optimiert für das Training tiefer neuronaler Netze und paralleles Rechnen
NVIDIA Jetson & Orin Plattformen: Energieeffiziente, auf Edge-KI optimierte Systeme für Echtzeit-KI-Verarbeitung, Robotik und autonome Systeme
Gaming-Workstations mit RTX-GPUs: Leistungsstarke Rechner mit aktuellen NVIDIA RTX 3090/4090/5090 Grafikkarten für Deep Learning, GPU-beschleunigte Berechnungen und grafikintensive Anwendungen
HPC-Cluster für verteiltes Rechnen: Systeme zur parallelen Verarbeitung von datenintensiven KI-Modellen, Simulationen und wissenschaftlichen Berechnungen
Kontakt
Prof. Dr.-Ing. Martin Strube
Studiendekan, Fakultät Maschinenbau
Gebäude A, Raum 051, Wolfenbüttel
